Live healthily
This project presents an intelligent health assistant designed to help individuals understand their health condition easily and accurately. The system analyzes a person’s symptoms to identify possible diseases, provides guidance on how to deal with them, and suggests appropriate medications.
The project also helps users stay updated on environmental conditions by providing real-time weather information, alerting them if the weather is suitable or potentially dangerous, especially in cases of pollution or extreme conditions.
The project aims to support doctors in diagnosing conditions, empower individuals to better understand and manage their health, and reduce children’s fear of doctors by offering a friendly and easy-to-use “assistant doctor” experience.
RoboPup

This project is a small quadruped robot that mimics the walking movement of a dog using two servo motors controlled by Quarky.
The main objective of this project is to understand servo motor control, basic robotics, and embedded programming. The servo motors move at specific angles using programmed instructions to create a walking motion.
This robotic dog project can be used in search and rescue, military surveillance, industrial inspection, and educational robotics. It also serves as a foundation for developing advanced quadruped and AI-based robots.
Rain Sensing Automatic Clothes Protection System

This project is designed to solve the problem that we face when it starts raining using automation.
It not only protects clothes but also has extended applications. For example, buzzer can be used as alerts to remind us to close open windows when it starts raining.IFTTT protocol is used to send message alert to mobile phone.
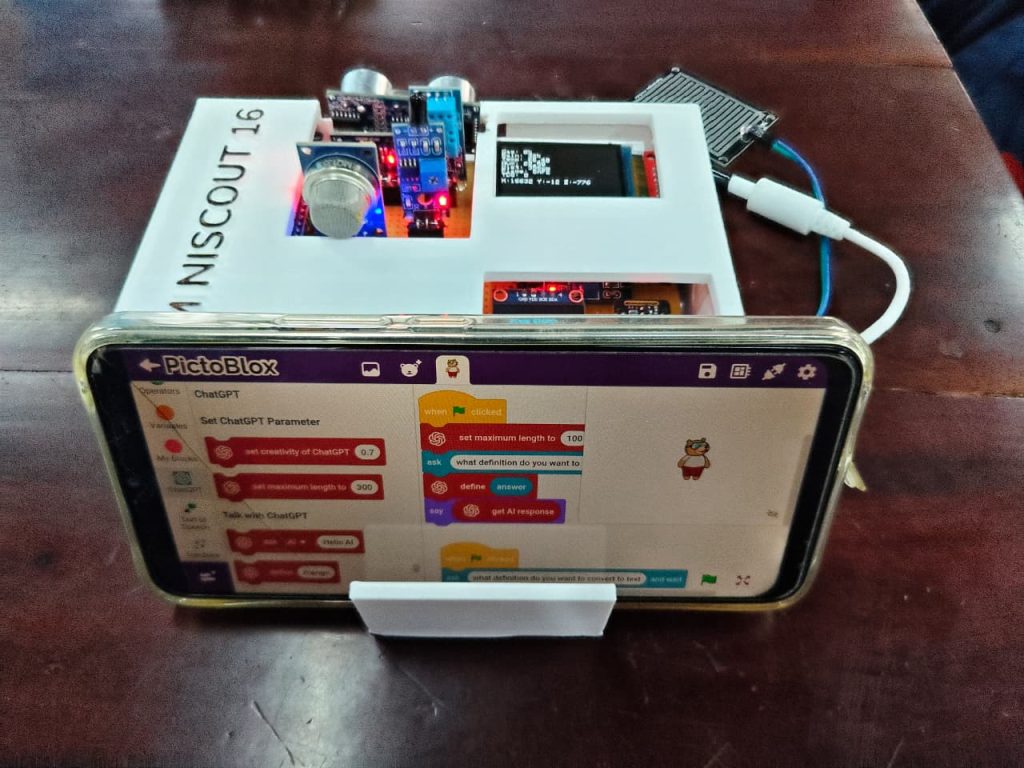
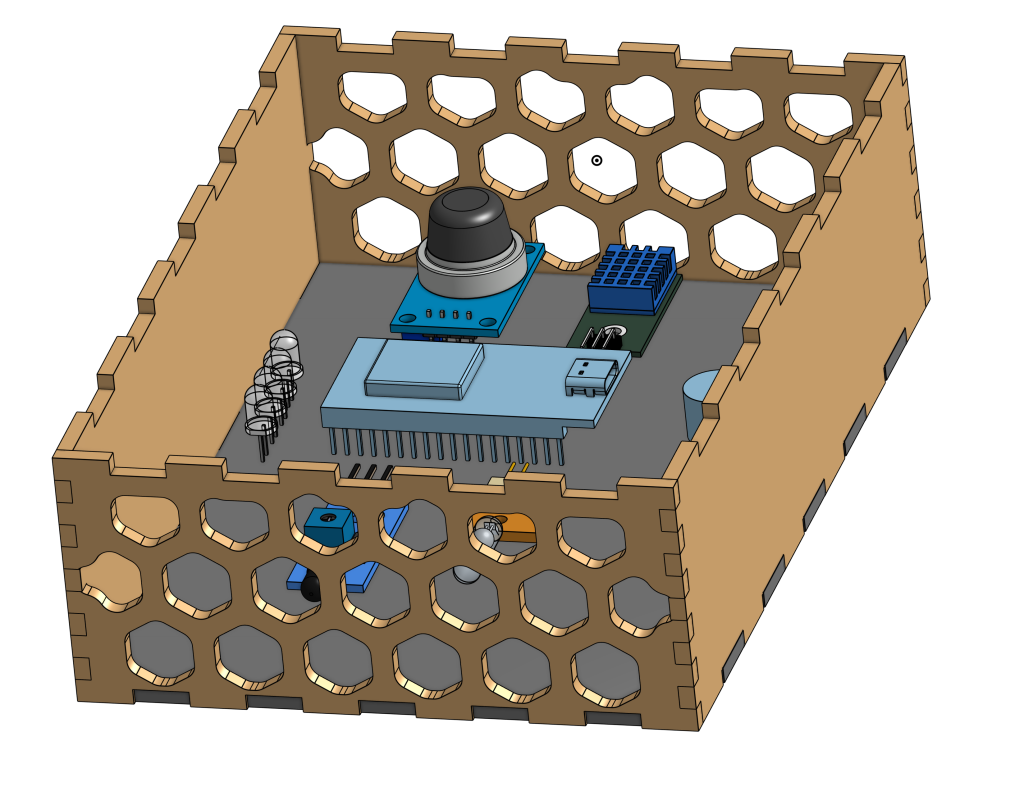
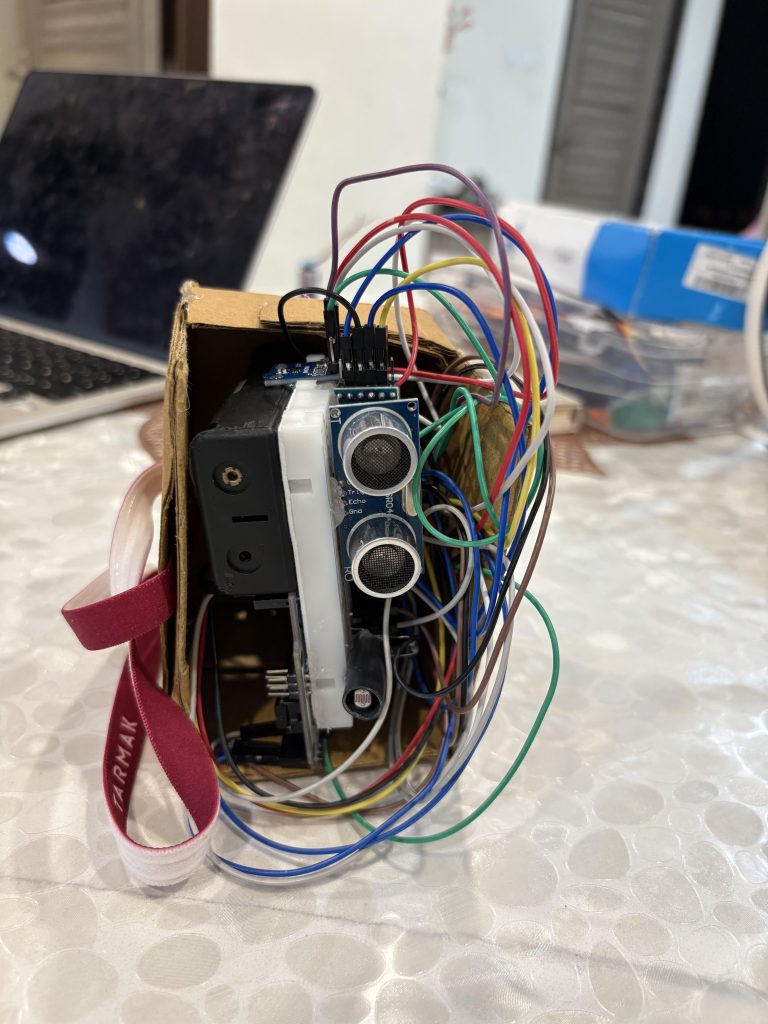
OMNISCOUT 16
WORKING OF THE ROBOT:
The OMNISCOUT 16 operates as a sophisticated Hierarchical Processing System. It splits
tasks between two “brains” to handle real-time sensor data, high-speed graphics, and IoT
connectivity simultaneously.
1. Data Acquisition (The Sensor Layer)
The robot constantly “feels” its environment through three distinct categories of sensors:
• Navigation & Safety: The HC-SR04 Ultrasonic sensor pulses sound waves to
calculate distance, acting as the “eyes” for the blind. The Raindrop sensor and TDS
sensor monitor liquid presence and water purity.
• Environmental Monitoring: The MQ-135 scans for harmful gases (Air Quality),
while the DHT11 tracks Temperature and Humidity, flame sensor detects fire and give
alerts
• Biometrics & Motion: The MAX30102 reads blood oxygen and heart rate through
the user’s fingertip, while the MPU-6050 tracks the probability of earthquake by
detecting P waves
2. Assistive Interaction (The Feedback Loop)
Once the data is processed, the robot interacts with the user in three ways:
• Visual Output: Data is formatted and sent to the 1.8” TFT (detailed graphs/weather)
and the 0.96” OLED (vital signs/text for the deaf).
• Auditory/Voice Assistant: If a threshold is met (e.g., “Obstacle Detected” or “Gas
Leak”), the ESP32triggers a buzzer Alert. For the speech-impaired, they can use the
keyboard to type and put number 8 ,then they can press enter so the text will be
translated to speech
• IoT Cloud Sync: Simultaneously, the ESP32uses its built-in Wi-Fi to upload these
“Live Readings” to an IoT Dashboard . This allows family members or doctors to
monitor the user’s health and environment remotely .
Operational Flowchart
Start: Power on Both controllers initialize.
Sense: ESP reads 5V / 3.3V sensors;.
Analyze: ESP32 checks if any sensor value is “Dangerous” (e.g., Heart rate > 100).
Act:
• Display: Update OLED/TFT.
• Voice: Speak status via TTS.
• IoT: Send data to the Cloud.
Loop: The entire process repeats every 2s for “Live” performance
CONCLUSION
The development of OMNISCOUT successfully demonstrates the power of a dual-
controller architecture in creating a high-performance, multi-functional assistive
robot. By bridging an Arduino Uno SMD and an ESP32 via the I2C protocol, the
project overcomes the limitations of single-board systems, ensuring stable real-time
data acquisition from a suite of 10+ sensors without sacrificing processing speed for
graphical output or IoT connectivity.
Through the integration of Text-to-Speech (TTS) and Speech-to-Text (STT),
OMNISCOUT 16 transitions from a simple sensor array to an active communication
bridge. It effectively addresses the critical needs of the visually, auditory, and
speech-impaired—providing navigation through ultrasonic scanning, visual subtitles
through OLED/TFT displays.
Furthermore, the inclusion of IoT capabilities transforms the robot into a universal
safety tool. It allows for remote health and environmental monitoring, making it as
valuable for common users and medical professionals as it is for those with
disabilities. Ultimately, OMNISCOUT 16 serves as a scalable, cost-effective prototype
that proves how inclusive design and smart technology can work together to foster
independence and safety for everyone, regardless of physical ability.
NeoResQ: AI Rescue and Support Robot
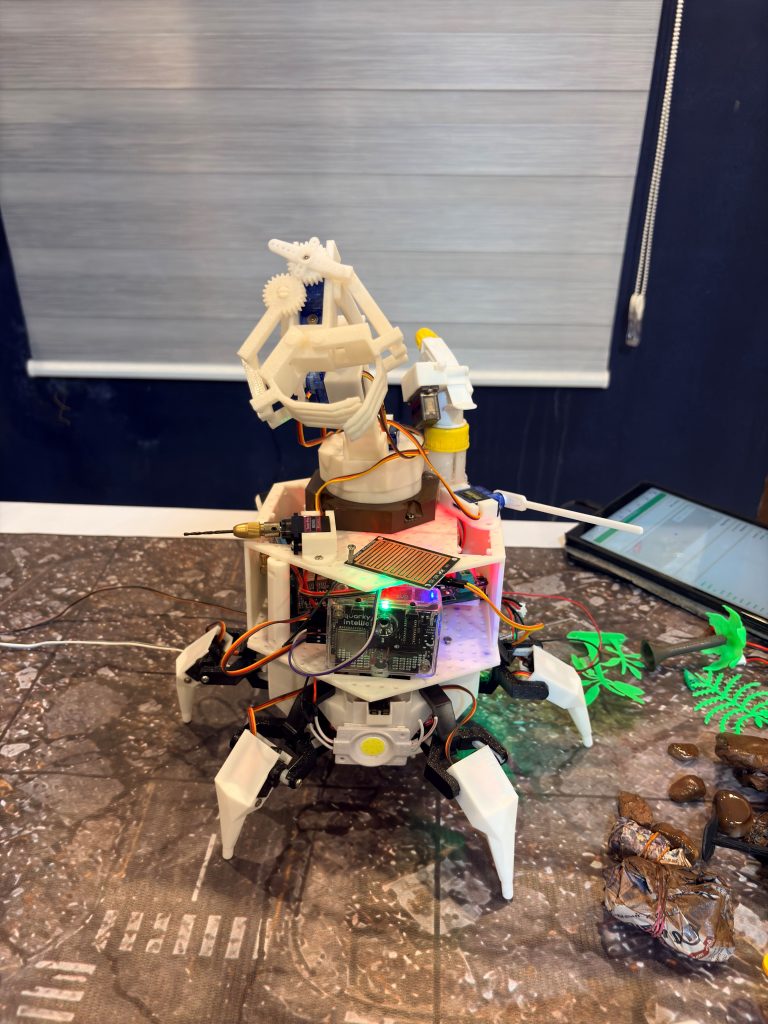
NeoResQ is an AI-powered rescue and support robot system designed to assist in disaster
response scenarios such as earthquakes, fires, borewell accidents, and collapsed structures. The
project aims to reduce risk to human rescuers while improving rescue efficiency through intelligent
automation.
NeoResQ integrates multiple specialized robots including quadruped walkers, spider robots, driller
units, crane systems, and gripper mechanisms. These robots are controlled via a unified
web-based dashboard that provides real-time video feeds, sensor data, and robot status
monitoring.
The system incorporates machine learning models trained using PictoBlox to detect humans or
obstacles from camera feeds and trigger automated responses. Environmental sensors monitor fire,
gas leakage, temperature, humidity, sound levels, and obstacles to ensure safe navigation in
hazardous areas.
Real-time GPS tracking enables precise localization of robots during rescue missions. With its
modular and scalable design, NeoResQ supports both individual robot operation and coordinated
swarm-based rescue strategies, aligning with Sustainable Development Goals focused on safer
cities and human well-being.
SWASTH MEDIBOT
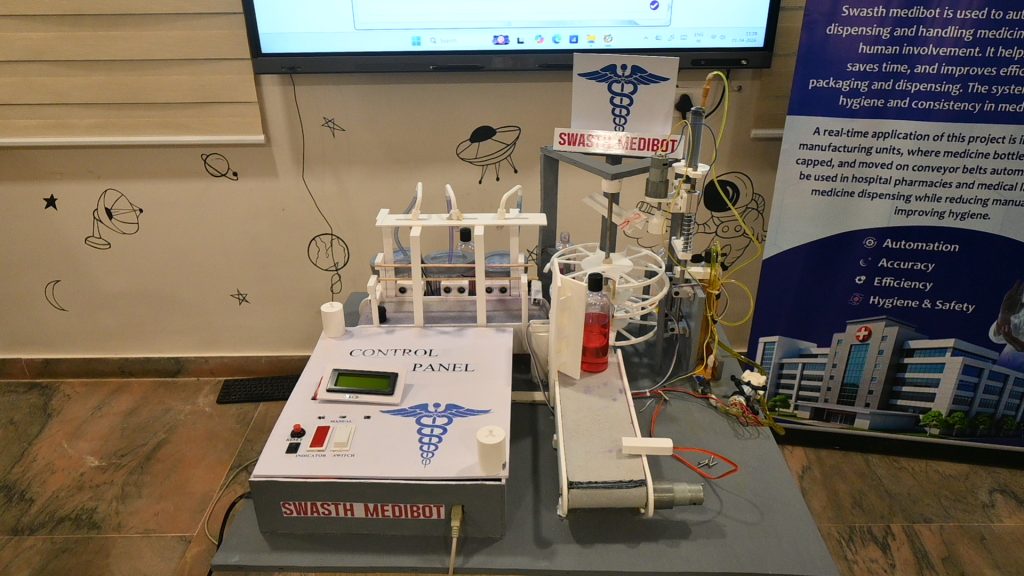
SWASTH MEDIBOT – Automatic Medicine Dispenser
Introduction
SWASTH MEDIBOT is an innovative healthcare automation
system developed to improve efficiency, hygiene, and
accessibility in medicine dispensing.
At the regional level, the system was manually controlled,
where the dispensing and movement of bottles required
human intervention.
For the national level, the project has been enhanced into a
fully autonomous smart system with advanced features such
as:
• Automatic bottle movement
• Automated filling and capping
• Speech-based medicine selection
• Intelligent dispensing system
Working Principle (Upgraded System)
1. User Interaction (New Feature)
o The system uses NLP (Natural Language
Processing)
o The user enters the symptoms such as cough,
Acidity and Vitamin deficiency.
o The system processes the input and selects the
correct medicine among three options.
2. Medicine Selection
o Based on the input, the controller activates the
respective dispensing unit.
3. Bottle Placement
o An empty bottle is positioned on the conveyor.
4. Filling Process
o The selected medicine is dispensed into the bottle
using pumps/valves.
5. Conveyor Movement
o The filled bottle moves through the conveyor
system.
6. Automatic Capping
o A 3D printed capping mechanism securely fixes
the cap onto the bottle.
7. Final Delivery
o The bottle moves to the secondary conveyor belt.
o The user collects the filled and sealed medicine
bottle.
CARE HUB

CARE HUB PROJECT REPORT
1. Introduction
Care Hub is an intelligent healthcare assistant robot designed to support elderly people and
patients by providing safety, monitoring, and emergency assistance. It integrates multiple sensors
and smart features to ensure health and security in real-time.
2. Objective
The main objective of Care Hub is to improve the quality of life for elderly individuals by offering
continuous monitoring, emergency alerts, and automated assistance.
3. Features
• Bluetooth Control for easy navigation
• Smoke Detection for fire safety
• Flame Detection system
• Emergency Alert Button
• Live Camera Monitoring
• Medicine Reminder/Dispenser
• UV Light for sanitization
• Entertainment Mode (Dance with music)
4. Components Used
• Arduino / ESP32
• Motor Driver (L298N)
• Sensors (Smoke, Flame)
• Camera Module
• Buzzer
• OLED Display
• Battery
• Chassis and Motors
5. Working Principle
The Care Hub robot continuously monitors the environment using sensors. If any danger such as
smoke or fire is detected, it alerts the user through buzzer and notifications. The robot can be
controlled via Bluetooth and also provides live video streaming. In case of emergency, the alert
button sends signals for help.
6. Advantages
• Improves elderly safety
• Real-time monitoring
• Easy to use
• Affordable solution
• Multi-functional system
7. Conclusion
Care Hub is a smart and efficient solution for elderly care. It combines safety, health monitoring,
and convenience into one system, making it a valuable innovation for modern healthcare needs.
Med Tech Minds

A Public assistant robot which helps you by providing currently needed medications and suggest you about the near by hospitals.
Our robot identifies the health issue you have in user friendly way and respond with in seconds and it is also available for all !
Crash_Flash
The Accident and Health Monitoring system is a smart safety solution designed to detect emergencies and provide immediate alerts using sensors and IoT technology. The main aim of this project is to ensure that in case of an accident, fire, gas leak, or health issue, the concerned authorities are informed quickly so that help can reach on time.
The system is built using an ESP32 microcontroller, which connects multiple sensors to continuously monitor the surroundings and the user’s condition. A flame sensor is used to detect fire, while a gas sensor identifies harmful gases in the environment. An accelerometer and gyroscope sensor help in detecting sudden movements, falls, or accidents. In addition, temperature and pulse sensors are used to monitor the health condition of the person. A GPS module is included to provide the exact real-time location during emergencies.
When any abnormal condition is detected, such as a fall, fire, gas leakage, or unusual health readings, the system immediately activates a buzzer and LED indicators to alert nearby people. At the same time, the ESP32 sends an alert message through the internet to parents, teachers, or emergency contacts. This message includes the type of emergency and the live location of the user, ensuring quick response and support.
This project is cost-effective, easy to use, and highly useful for students, riders, and individuals who may face emergencies while alone. It combines safety monitoring and health tracking into one system, making it a reliable solution for real-time emergency detection and response.
Eylo
Myopia has emerged as a significant global health challenge among children, due to increased digital screen exposure, prolonged near-work, and reduced outdoor activity. To slow the progression of Myopia , Clinical studies recommend maintaining safe reading
distance, adequate lighting, limiting continuous screen time, and ensuring at least two hours of daily sunlight exposure.
Eylo presents a wearable eye care device built using Arduino-Uno and multiple sensors. A BH1750 lux sensor measures ambient light, an ultrasonic sensor estimates viewing distance, and an LDR-based detector differentiates screen usage from book reading. The system tracks total screen time, reading time, outdoor time, and provides real time alerts under unsafe conditions. Usage
time is transmitted via an HM-10 BLE bluetooth module to a mobile application for parents to see. We further want to include IMU-based posture control and AI based analysis for personalized insights.