
Do you love football and robots?
Then Track 3 of Codeavour, the Robo Soccer League, is where your excitement turns into a real, moving, goal-scoring machine.
Because here’s the twist: you are not just watching a match. You are building the players.
You’ll design your own soccer robot, wire it up, code how it moves, and then send it into a real mini stadium to attack, defend, and win as a team. And while your robot chases the ball, you’re quietly leveling up in the skills that matter most: coding, electronics, mechanics, teamwork, and problem-solving.
If you’ve ever wondered what it actually takes to create a robot that can compete like a true athlete, this blog is for you.
Ready to turn your ideas into a robot team? Let us begin.
The Robo Soccer Arena
Before any robot can play, it needs a ground.
In Robo Soccer League, your match happens inside a special Robo Soccer Arena. According to the rulebook:
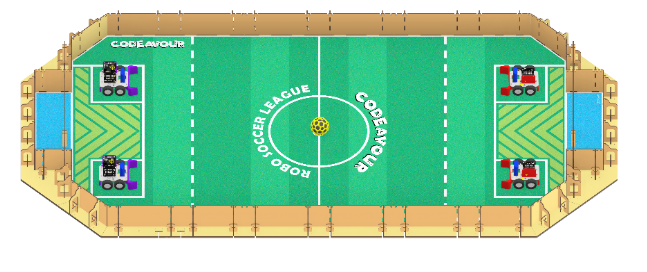
- Arena area is about 8 feet by 4 feet
- Inner playing area is about 6.5 feet by 3.6 feet
- There is a boundary wall that is about 10 to 15 cm high
- Each goal post is about 40 cm wide, 25 cm high and 20 cm deep
- The surface is flat with clear white lines so sensors and cameras can see well
Important markings on the field:
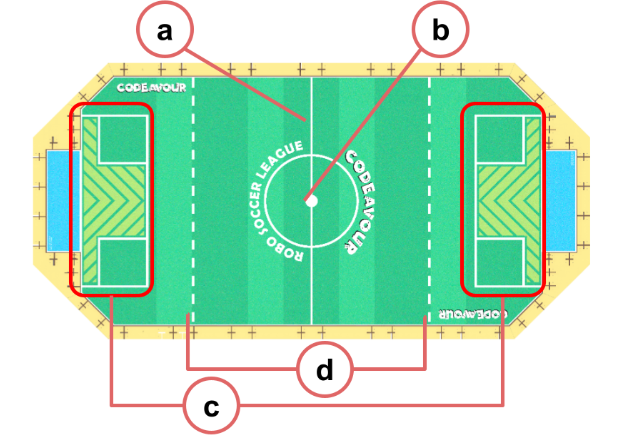
- A centre line that divides the field into two halves
- A centre dot where the ball is kept for every kick off
- A D box in front of each goal where robots start at kick off and reset
- A dashed penalty line in front of each goal
The ball starts at the centre dot. Your robots start from inside the D box on your side.
You and your teammates stand at the corners of your side of the arena and control the robots from there.
Once the referee blows the whistle, the match begins.
What Makes a Soccer Robot
In robotics, a mechanism is a set of parts that move together to help your robot do something in the real world, like grab, lift or shoot. It is made from links, joints and other parts that connect and transfer motion.
For Robo Soccer, every robot starts with six main building blocks:
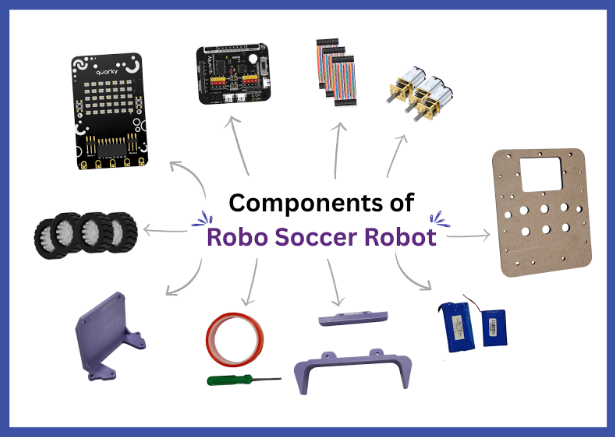
- Motors
Make the wheels spin and help your robot move. - Battery
Gives power to everything. - Controller board
This is the brain that follows your code. For example Quarky, Arduino, micro:bit or ESP32. All of these can work with PictoBlox. - Chassis or body
The base plate or frame that holds all the parts. - Wheels
Give grip and direction to your robot. - Mechanism
The special front part that controls the ball, kicks it or blocks it.
Once you understand these parts, you can start thinking like a robot designer, not just a player.
Robo Soccer Mechanisms to Explore in Track 3 (and What They Help You Do)
In Track 3, your robot’s mechanism becomes its playing style. Wheels help it move, but the mechanism decides how it can kick, push, block, redirect, or control the ball during a match.
There’s no single “best” design. The fun part is testing ideas, learning from what works, and improving your build like real engineers do. Here are the most popular mechanisms teams explore in Robo Soccer, explained simply.
1) Kicker Mechanism: 4-Bar Linkage
What is it?
A 4-bar linkage uses four rigid links joined by pivots. When your motor or servo rotates one link, the last link swings in a controlled back-and-forth motion. That motion is ideal for creating a kick that feels less like a sudden jerk and more like a clean “strike.”
Where you’ll spot it in Robo Soccer
This mechanism often shows up in robots that want a repeatable shooting action. You’ll notice it when the bot can:
- Set up behind the ball,
- Swing a consistent kicking arm,
- Reset quickly for the next move.
(You’ll commonly see it in builds like the Gear Kicker Robot and MG995 Servo Kicker Robot.)
Why teams explore it
Teams like 4-bar linkages because they can design the kick instead of just hoping the ball flies. It’s great when you want to experiment with:
- A kick that follows a predictable path
- Controlled angle (low shot vs slightly lifted shot)
- Smooth motion that’s easier to repeat in practice

Key design ideas
- Change link length to adjust power and travel
- Shift pivot positions to tune kick angle
- Use a servo or a geared DC motor
2) Gear-Based Kicker Mechanism
What is it?
A gear-based kicker uses a gear train to increase torque before moving the kicker arm. In simple words: gears help a small motor behave like a stronger one.
Where you’ll spot it in Robo Soccer
You’ll usually find this on robots built for moments like:
- Clearing the ball away from your goal quickly
- Shooting from farther out
- Handling situations where the ball needs a more forceful push
(Common in the Gear Kicker Robot style builds.)
Why teams explore it
Teams choose gears when they want to play with mechanical advantage. It becomes a fun engineering decision:
- Do you want more power (with slower movement)?
- Or faster motion (with less force)?
Either way, gear ratios let you test and tune.
Key design ideas
- Higher gear reduction → more torque, slower kick
- Lower gear reduction → faster swing, less force
- Add a spring if you’re experimenting with extra impact
3) Servo-Driven Kicker Mechanism
What is it?
A high-torque servo rotates the kicker arm directly. No gear train, no complex linkages. It’s one of the most beginner-friendly ways to get a working kick.
Where you’ll spot it in Robo Soccer
This is common in robots where teams want:
- Quick build time
- Clean control through code
- A reliable “kick on command” action
(You’ll see this style in MG995 Servo Kicker Robot builds.)
Why teams explore it
Teams love this mechanism because it’s a direct connection between code and action:
- You write at an angle, the arm moves to that angle.
- You set a timing, it resets on timing.
It’s perfect for teams who want to focus more on control, strategy, and iteration than mechanical complexity.
Key design ideas
- Use metal-gear servos for durability
- Limit kick range to avoid servo strain
- Improve performance by tuning kick timing in code
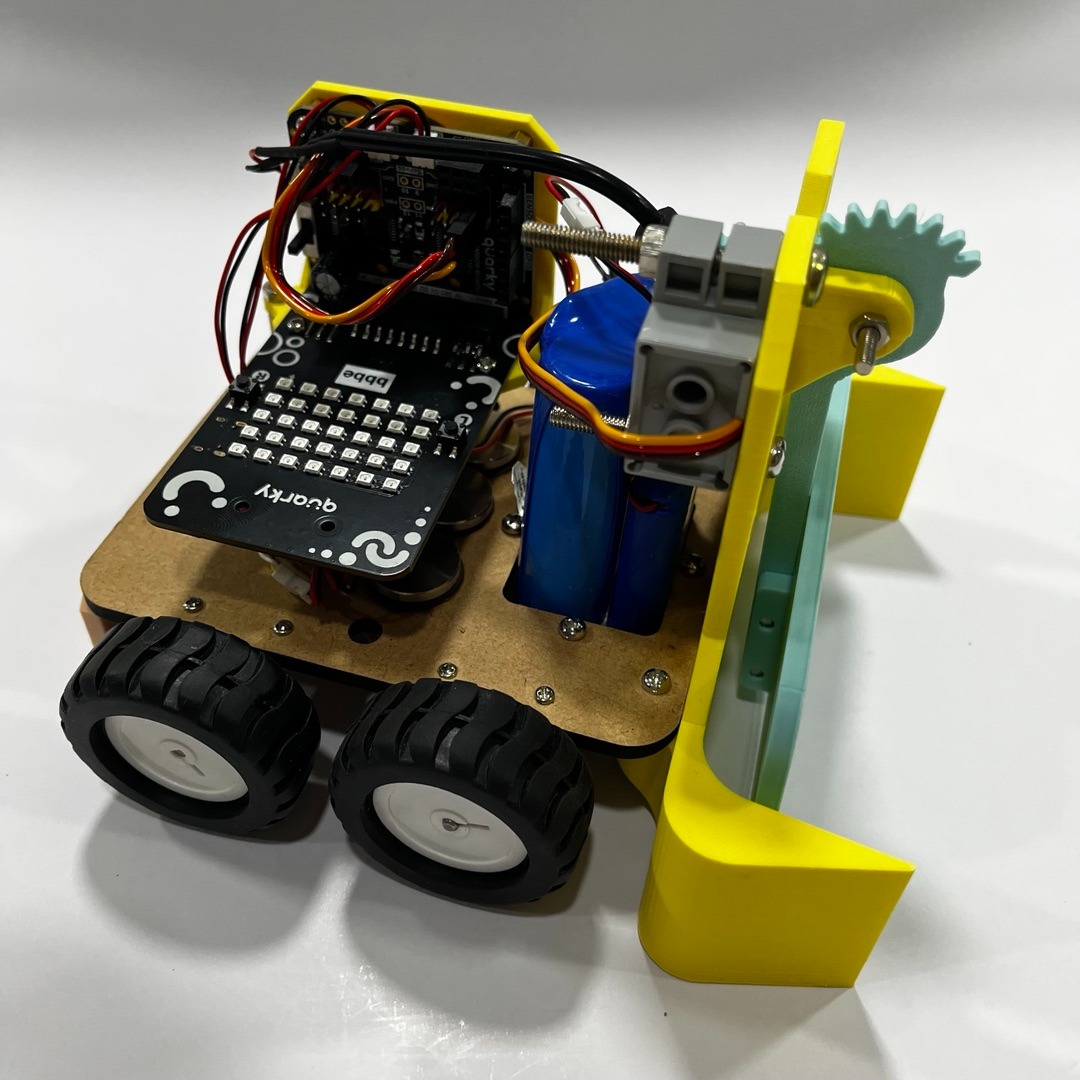
4) Flipper Mechanism
What is it?
A flipper is a rotating arm designed to lift, redirect, or pop the ball during tight situations. It can also be used to nudge or disrupt an opponent robot when they’re blocking your path.
Where you’ll spot it in Robo Soccer
Flippers shine when the game gets crowded:
- Ball stuck near a wall or corner
- Quick redirection needed without turning the whole robot
- Close-range battles where push alone isn’t enough
(Used in builds like Mini Flipper Push Robot and 6WD Flipper Robot.)
Why teams explore it
Teams use flippers because they’re multi-purpose and strategic:
- It can help you regain control in chaotic moments
- It encourages timing and decision-making, not just speed
- It can shift gameplay without needing a powerful kick
Key design ideas
- Strong pivot joint (impact-ready)
- Fast reset speed (so you’re ready again)
- Balance torque and speed for your playstyle
5) Scissor Mechanism: Shooter / Pusher
What is it?
A scissor mechanism expands and contracts like an “X.” Small motor rotation can translate into a longer linear push, which makes it useful for building a shooter or strong pusher action.
Where you’ll spot it in Robo Soccer
This mechanism shows up in robots that want:
- A straight-line push or “shot” motion
- A mechanism that reaches forward without the whole bot moving
- Controlled ball movement in narrow lanes
(Common in Scissor Robot builds.)
Why teams explore it
Teams like scissors because it’s a great lesson in real mechanical engineering:
- How to convert rotation into linear extension
- How stability and alignment affect performance
- How compact designs can still produce strong motion
Key design ideas
- Set a safe max extension
Reinforce joints to reduce wobble - Add a guide so the ball moves straight
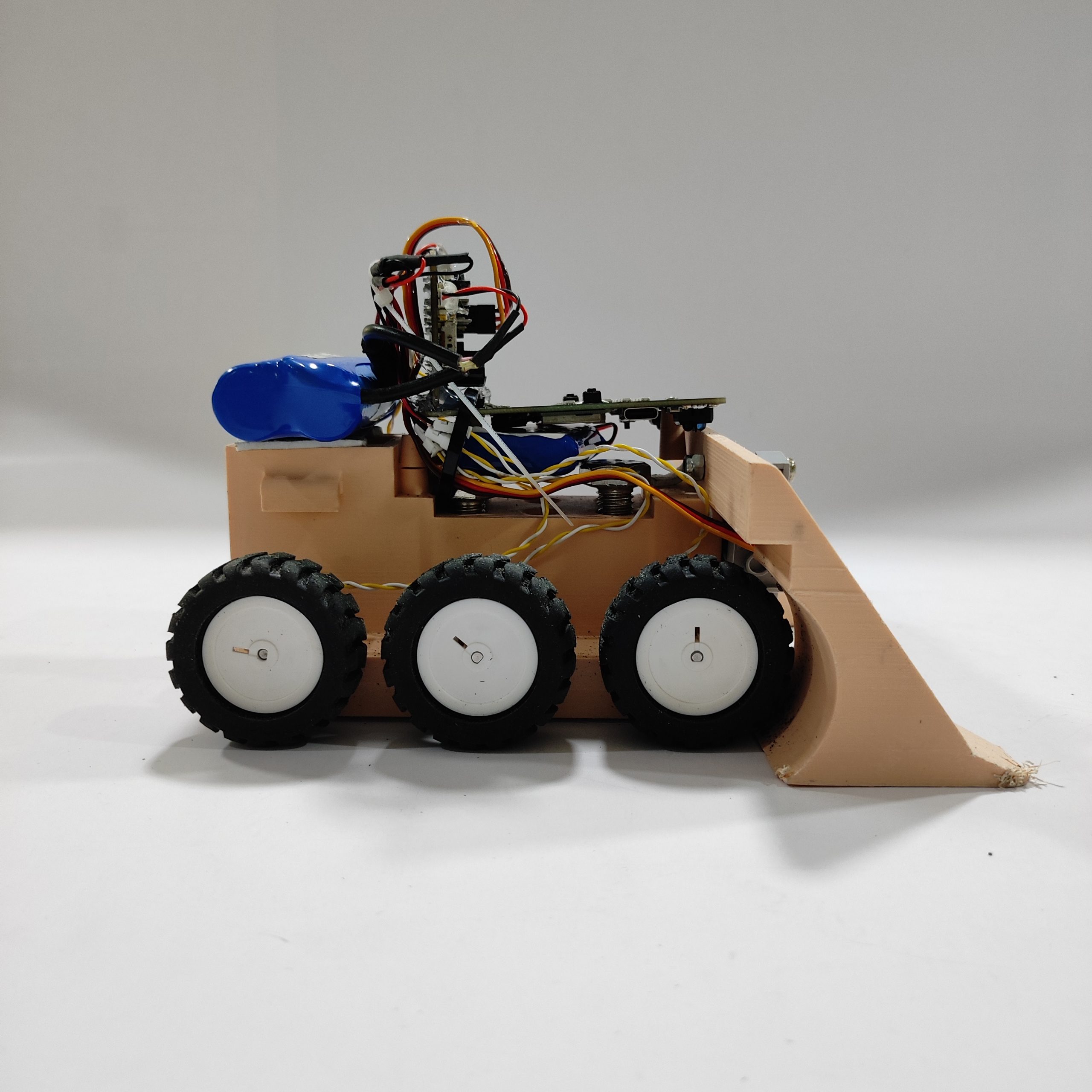
6) Wedge and Defensive Geometry

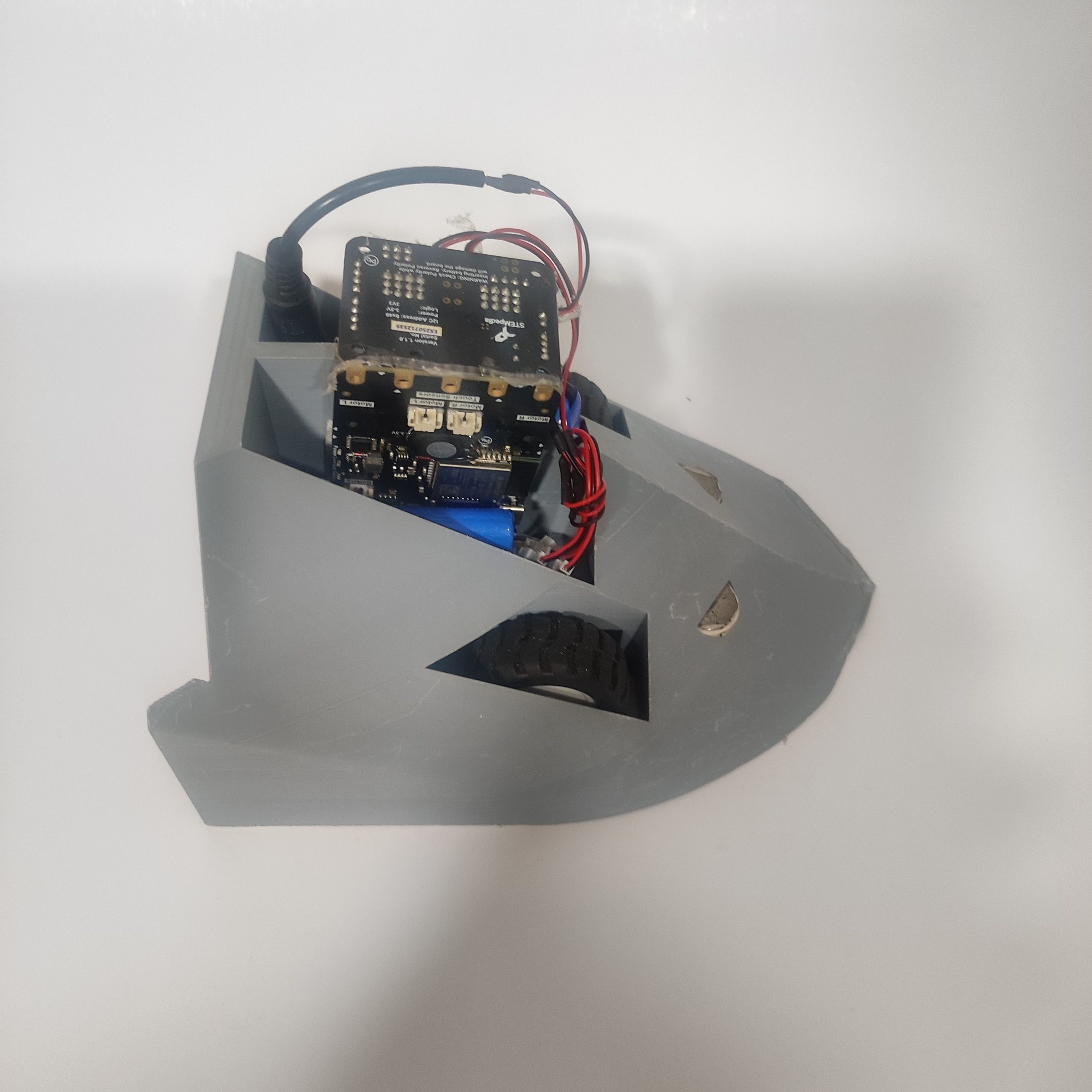
What is it?
This isn’t a “mechanism” with moving parts. It’s smart shape design. A wedge robot uses angled surfaces to deflect the ball, block lanes, and guide movement using geometry alone.
Where you’ll spot it in Robo Soccer
Wedges are often built for:
- Defensive play near the goal
- Intercepting and redirecting the ball
- Holding strong positions without risking mechanical failure
(Common in No-Mess Wedge Robot builds.)
Why teams explore it
Teams choose wedges because they’re a masterclass in simple, powerful thinking:
- It proves that design isn’t always about more parts
- It helps teams focus on driving skills, positioning, and control
- It’s a great option when you want reliability and clean movement
Key design ideas
- Keep low ground clearance
- Use smooth angled surfaces
- Protect electronics with proper covering
Drive Systems for Robo Soccer (2WD vs 4WD vs 6WD)
In Robo Soccer, WD means “Wheel Drive.”
It tells you how many wheels are powered by motors.
More powered wheels usually means more grip and control, but it can also mean more weight and less speed. So it’s about choosing what fits your robot.
2WD (2-Wheel Drive) – Fast and Simple
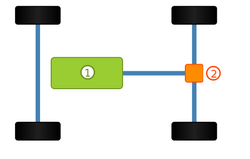
What it feels like: quick, light, and easy to move.
Where you’ll see it:
- Fast 2WD Robot
Why kids choose 2WD:
- You can build it faster and keep it simple
- It can move quickly because it’s lighter
- Great if your robot’s job is to zoom to the ball first
Good for:
- Speed
- Lightweight robots
- Quick turns and quick dashes
4WD (4-Wheel Drive) – More Control, More Balance
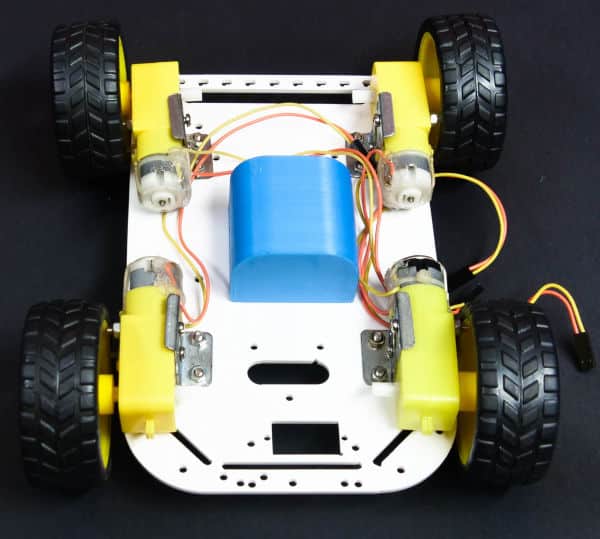
What it feels like: steady, stable, and easier to control in a match.
Where you’ll see it:
- Most soccer robots
Why kids choose 4WD:
- More grip on the floor so it slides less
- Better control when the ball hits your robot
- More stable when you add a kicker or extra parts
Good for:
- Stability
- Better traction
- Control while turning and stopping
6WD (6-Wheel Drive) – Maximum Grip and Pushing Strength

What it feels like: strong, heavy, and hard to push away.
Where you’ll see it:
- 6WD Flipper Robot
Why kids choose 6WD:
- Extra wheels help it stay steady even with heavy mechanisms
- Great when robots bump into each other a lot
- Helps when your robot needs to push or hold position
Good for:
- Strong pushing power
- Heavy mechanisms (like flippers)
- Staying stable in tough moments
Speed-Focused Robots (Built to Move Fast)
Some robots are made for one main purpose: reach the ball quickly and move around opponents. These builds usually stay light, simple, and quick.
Fast Technic Robot
What it’s about:
- A lightweight body so the robot doesn’t feel slow
- Quick acceleration so it starts moving fast instantly
- Built to dash, turn, and chase without hesitation
Fast 2WD Robot
What it’s about:
- Minimal design (fewer parts = less weight)
- Agile movement and quick turns
- Great for kids who want a robot that’s easy to build and fun to drive
Start Your Robotics Journey with Codeavour 7.0
Building a robot for the Robo Soccer League is one of the most practical ways to understand how machines interact with the real world. Codeavour 7.0 International serves as a specialized entry point into this field, offering a structured environment where kids and teens can move from basic assembly to advanced programming.
This competition is the best chance to start in robotics because it bridges the gap between theory and physical engineering. It provides the necessary framework for students to master autonomous robot navigation and mechanical gear systems while competing on a global level. By participating, you develop the technical proficiency required for AI-integrated STEM projects and real-world problem-solving.
To begin your build with the same professional-grade components used in the competition, you can get everything you need in one place. If you want to shop Codeavour kits, visit here to find the right hardware for your project.